MAURÍCIO DUARTE
ROBÓTICA EDUCACIONAL
Kits Robóticos Educacionais em MDF e SpumaPaper para ARDUINO.
Design by MauricioDUARTE
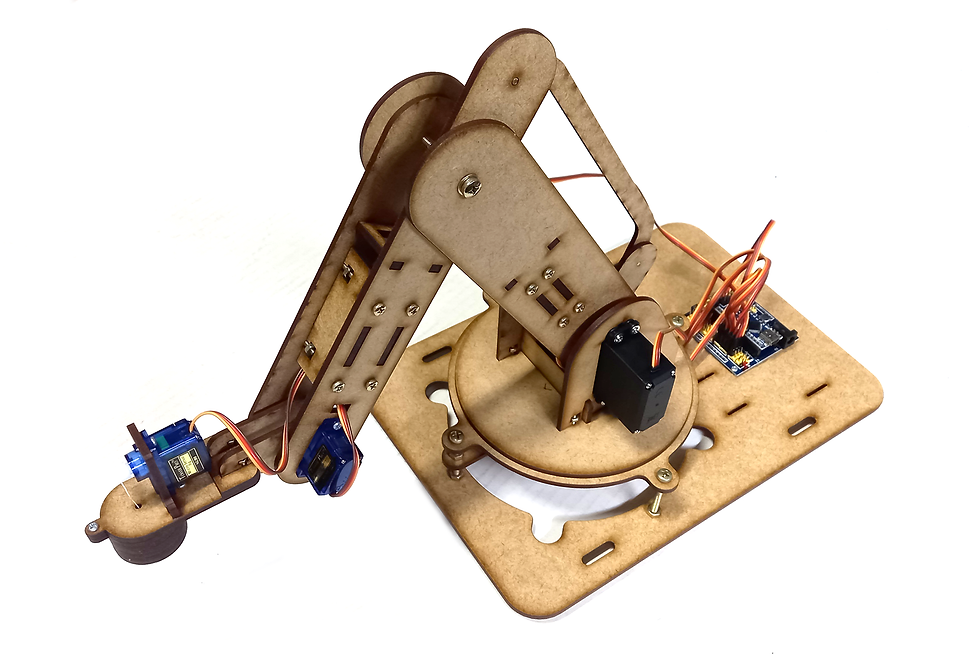
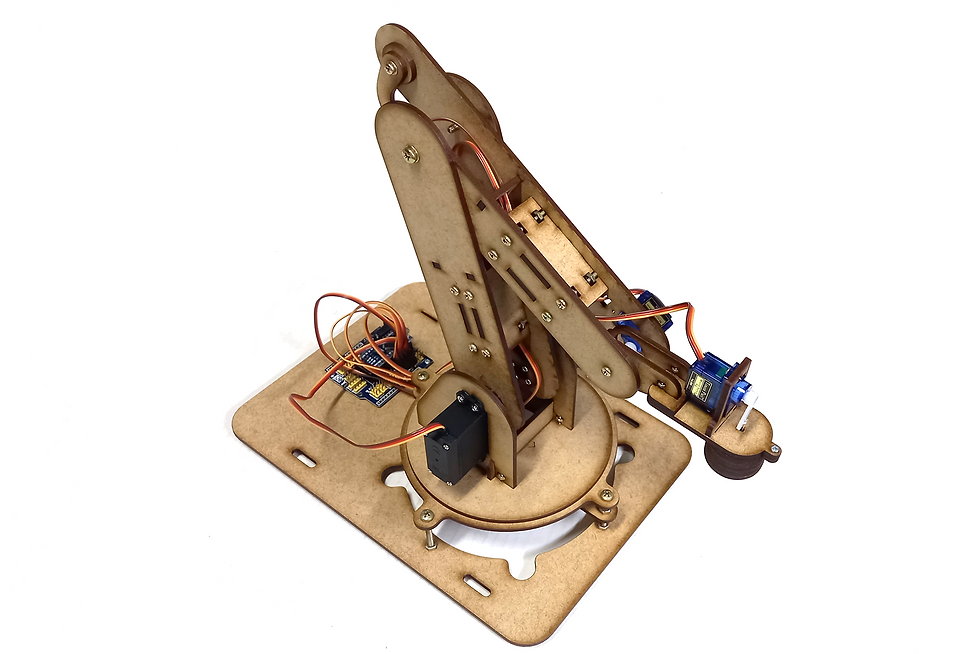
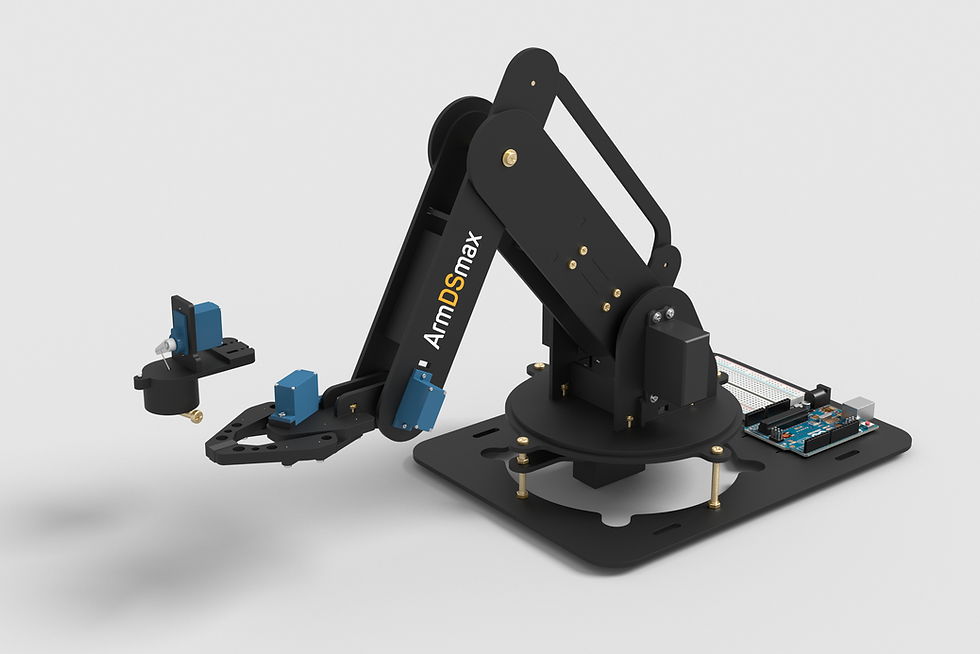
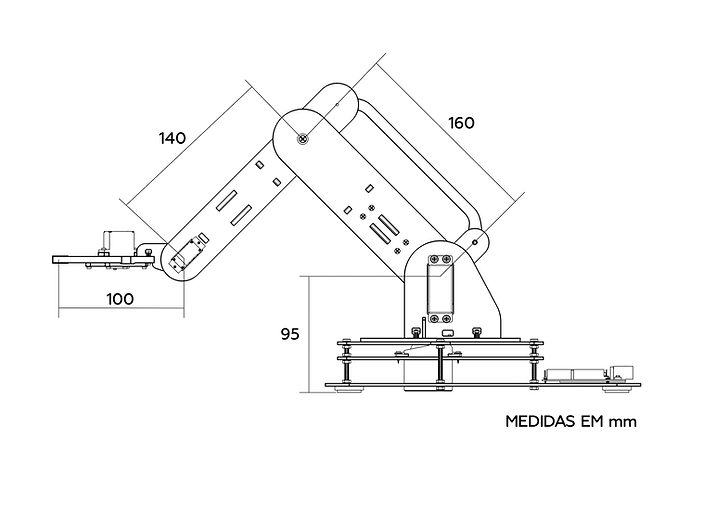
ArmDSmax
KIT BRAÇO ROBÓTICO EM MDF PARA ARDUINO
● Projeto exclusivo, sem similar no mercado
● Ideal para projetos e cursos de robótica
● Fácil de montar
● Duas opções de garra: Tradicional e Magnética
● Estrutura rígida em MDF cortado a laser
● 4 Graus de liberdade
● 2 Servo motores 9g (SG90)
● 3 Servo motores grandes (MG955 ou MG996r)
● Alimentação 5 a 6v – 5A
● Ligação direta com ARDUINO
Imagens ilustrativas

GARRA MAGNÉTICA
● Design inovador
● Utiliza imãs permanentes de neodímio
● Fácil de montar e leve
● Acionada por um servo 9g
● Não é preciso alterar o código na troca
da garra tradicional para a magnética


BIBLIOTECA VarSpeedServo
Essa biblioteca do Arduino possui comandos para controlar a velocidade de acionamento dos servos. É bem útil para Braços Robóticos.
No vídeo acima ela foi usada para deixar os movimentos mais lentos.
N
CÓDIGO BÁSICO COM VarSpeedServo
BIBLIOTECA ServoEasing
Essa biblioteca do Arduino possui comandos para rampa de velocidade de acionamento dos servos. Ela deixa os movimentos do Braço Robótico suaves e orgânicos.
No vídeo abaixo pode ser visto os movimento usando essa biblioteca.
N
CÓDIGO BÁSICO COM ServoEasing
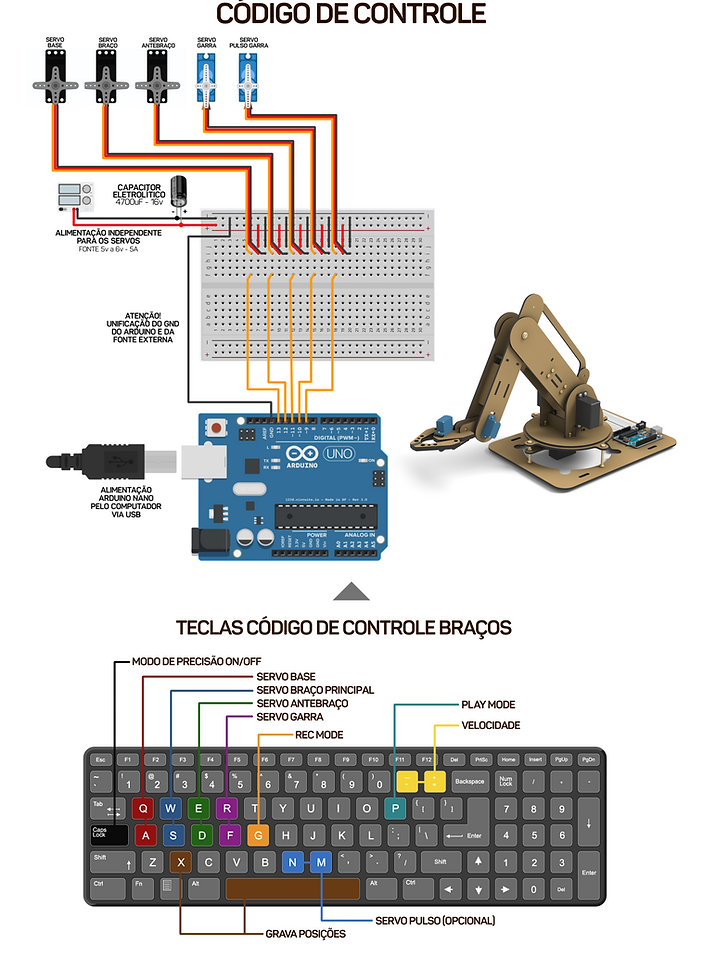
Baixe aqui nosso código de controle para o ArmDS4 via teclado do PC.
Movimente, grave várias posições e veja seu robô executar os movimentos gravados.
Comandos através do Monitor Serial da IDE do Arduino, veja o vídeo abaixo.
Q,A > Movimentam a Base (10 graus e 1 grau no Modo de Precisão)
W,S > Movimentam o Braço Principal
E,D > Movimentam o Antebraço
N,M > Movimentam o Pulso
R,F > Movimentam a Garra
G > Entra no Modo de Gravação
X, Espaço > Grava uma Posição
P > Entra no Modo Play (Executa os movimentos em loop)
CAPS LOCK > Se ligada entra no modo de Precisão
+ , - > Altera a Velocidade dos movimentos
CÓDIGO ArmDSmax
CONTROLE VIA TECLADO